Doit-on à tout prix introduire les robots sociaux dans nos quotidiens ?
Ce projet a pour objet de tester, par une étude expérimentale, les liens entre la perception de contrôle (ou son manque) et l’anthropomorphisme, ainsi que les conséquences sur l’acceptabilité des robots sociaux, afin de pouvoir anticiper les avantages ou les inconvénients qu’il y a de les introduire.
robots-entete
Projet de recherche de l'Axe 2
DATE : 2021
RESPONSABLE : Dayle David, LAPCOS
DISCIPLINE : psychologie sociale et ergonomie
MOTS-CLÉS : qualité de vie, sentiment de contrôle, acceptabilité, anthropomorphisme, robot social
Description du projet
CONTEXTE
Le domaine de la robotique connaît une croissance exponentielle. Ce contexte donne une place particulière aux robots sociaux plus spécifiquement conçus à des fins d’accompagnement. Ils sont définis comme des entités physiquement incarnées, capables d’interactions sociales et ayant des comportements suscitant des réponses sociales de la part des utilisateurs. En raison de la méconnaissance dont ils font l’objet, de l’image qu’ils renvoient et de leur caractère imprévisible (c'est-à-dire la difficulté de prévoir leurs réponses et actions), la présence des robots sociaux peut affecter le sentiment de contrôle des potentiels utilisateurs – et par voie de conséquence leur usage.
Or, la perception du contrôle est un besoin fondamental pour l’humain, une nécessité psychologique et biologique associé à un instinct de survie. Il s'agit d'une fonction adaptative qui nous permet d’anticiper et de prédire les actions des autres. Ainsi, lorsque que la perception de contrôle est menacée, les personnes adoptent des stratégies de compensation pour faire face au malaise et à l’anxiété que cette réduction du contrôle suscite.
Face aux robots sociaux, un des moyens de contrôler, prédire et anticiper leurs actions serait de les anthropomorphiser, c'est-à-dire d'attribuer des caractéristiques typiquement humaines à des agents non-humains (p. ex., intentions, émotions). En effet, l’anthropomorphisme est décrit dans la littérature comme une stratégie de compensation d’un manque de contrôle, qui permet de structurer notre environnement, d’y trouver du sens et de l’ordre. Plus encore, en rendant possible l’application de scripts sociaux généralement déployés dans les interactions entre humains, l’anthropomorphisation du robot social permettrait de le percevoir alors comme plus familier, prévisible et contrôlable.
Une meilleure connaissance des liens entre le sentiment de contrôle et les stratégies compensatoires telle que l’anthropomorphisme doit permettre de mieux comprendre à quelles conditions les robots peuvent être intégrés et acceptés ou non.
OBJECTIFS
Cette étude expérimentale s’inscrit dans le projet de thèse de Dayle David qui vise à examiner différents types de perception de contrôle ou plutôt de manque de contrôle (p. ex., sur un événement de vie, sur le robot social et sur une tâche), croisés avec le contexte social d’implication du robot (p. ex., domestique, professionnel, médical), en tant que facteur déterminant des stratégies d’anthropomorphisme (ou non) à l’origine de l’acceptabilité (ou non) des robots. De ce sentiment de contrôle, de son maintien ou de son atteinte, découle notamment l’intention d’usage des robots.
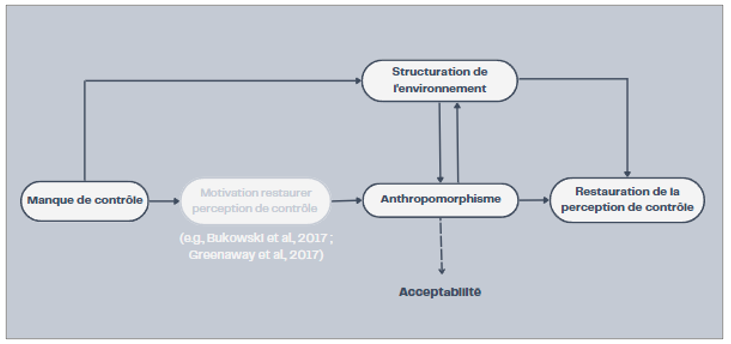
Modèle à tester
robots-methode
L’objectif de l’étude expérimentale vise à comprendre comment l’expérience de contrôle ou sa privation (c'est-à-dire, l’expérience d’un manque de contrôle) de manière répétitive lors d’une tâche, influence l’adoption (ou non) de la stratégie d’anthropomorphisme et ses conséquences en termes d’acceptabilité du robot social.
MÉTHODE
Les participants (N = 235) sont invités à répondre à une procédure en ligne :
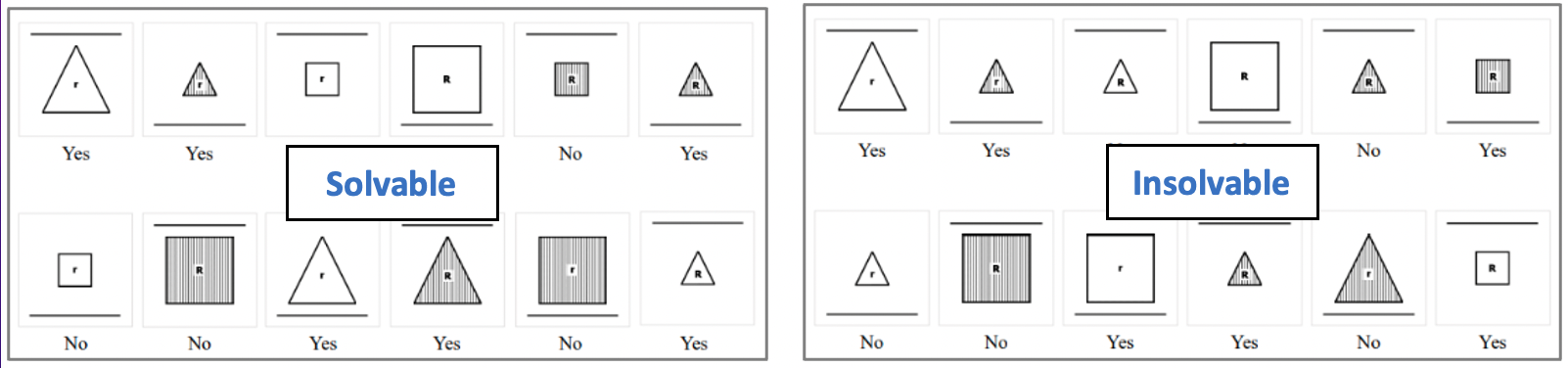
- Effectuer une tâche de résolution de problèmes nommée Informational Helplessness Training (IHT).
Cette tâche est utilisée pour induire une expérience de contrôle (vs. expérience de privation de contrôle) en exposant les participants à des problèmes solvables ou insolvables, et ce, de manière répétée.
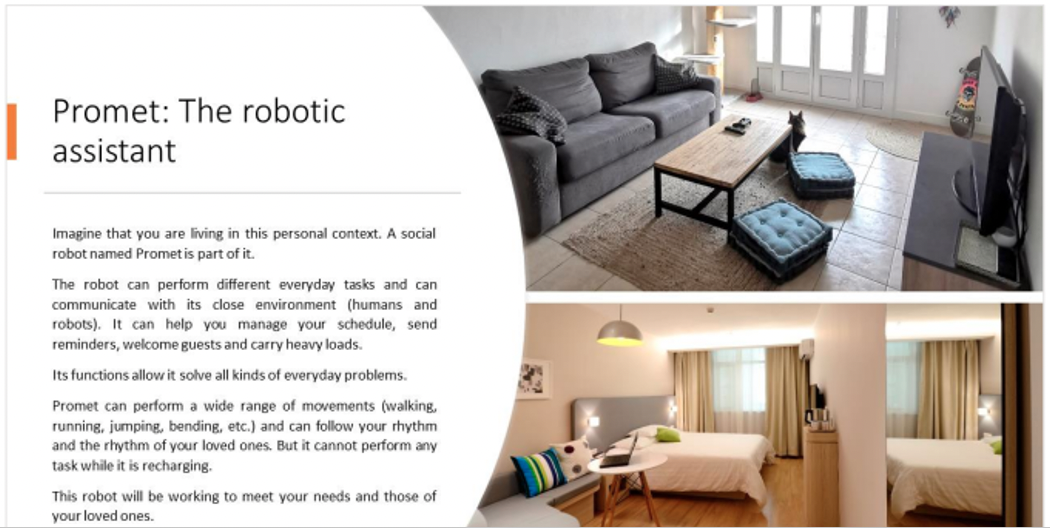
- À la suite de cette tâche, les participants sont invités à lire attentivement un scénario présentant un robot social intégré dans un environnement domestique
- Enfin, les participants doivent indiquer dans quelles mesures ils anthropomorphisent le robot (Social Robot Anthropomorphism scale - SRA), l’acceptent (Persuasive Robots Acceptance Model - PRAM) et leur degré de familiarité avec cette technologie
Tâche IHT : retrouver la caractéristique commune aux 12 figures
robots-illu01
Scénario du robot présenté
robots-illu02
Interdisciplinarité et partenariats
Ce projet s’insère dans un programme de recherche de la thèse de Dayle David.
PORTEURS DU PROJET
Dayle David, doctorante en 2e année en psychologie Sociale, LAPCOS - Laboratoire d’Anthropologie et de Psychologies Cognitive, Clinique et Sociale
Pierre Thérouanne, MCF en psychologie cognitive et ergonomie, LAPCOS, EUR HEALTHY
Isabelle Milhabet, PU en psychologie sociale et psychologie sociale de la santé, LAPCOS, EUR ODYSSÉE
PARTENARIAT
Ambre Denis-Noël, ingénieure CoColab
robotssociaux-logos
Résultats et valorisation
Les participants, quelle que soit leur condition expérimentale, n’ont pas évalué de manière différente l’anthropomorphisme et l’acceptabilité des robots.
Dans cette étude, l’anthropomorphisme ne peut être qualifiée de stratégie de compensation d’un manque de contrôle. L’exposition répétitive et prolongée de privation de contrôle aurait conduit à un épuisement cognitif et une démobilisation des participants.
Cela étant, dans cette étude, l’anthropomorphisme et l’acceptabilité du robot social corrèlent positivement.
Une collaboration est engagée avec l’Université de Rennes 2 (Alain Somat, Nathalie Pichot), l’Université de Caen (Jessica Mange) et avec le laboratoire GREDEG (Guilhem Lecouteux, Mathieu Chevalier) sur le projet TIROBOTfr (« Les interactions Humain-Robot renforcent-elles les stéréotypes culturels ? Application du « biais du TIReur » aux rOBOTs dans un contexte Français ») financé par l’Académie 5.
Conférences
Le projet a été présenté lors de différents colloques et congrès (communications et posters) :
Les premiers résultats du projet ont été présentés le Vendredi 25 mars 2022 lors des Journées de restitution des projets Académie 5 - MSHS Sud-est des 24 et 25 mars 2022. - Voir la présentation ci-dessous (ANNEXE 3)
Dayle David, Isabelle Milhabet, Pierre Thérouanne. L’anthropomorphisme comme stratégie de compensation d’un manque de contrôle. 14e Congrès International de Psychologie Sociale (CIPS), 11-13 Juillet 2022, Bordeaux, France
robots-bordeaux
Publications
David, D., Milhabet, I., & Thérouanne, P. (en préparation). When the lack of control affects anthropomorphism and acceptability of social robots.
David, D., & Spatola, N. (en préparation). Effectance motivation: unpredictability and uncontrollability in the anthropomorphism strategy.